uygulamamıza başlamadan evvel ilk olarak bilgisayarımıza PYTHON kurmamız lazım BURAYA tıklayarak indirip kurunuz lütfen
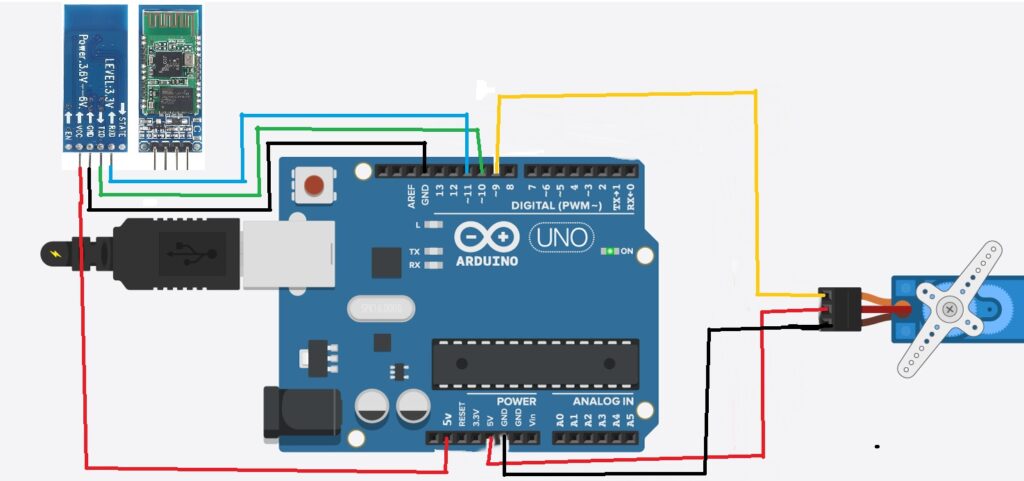
arkadaşlar bu günki uygulamamız bir önceki pc ve cep kontrollü rgb lamba uygulaması ile aynı paralellikte bulunmaktadır tek farkı neopixel yerine servo motor un olması bunun için iki kontrol sistemi mevcut ilk olarak aşşağıdaki şemaya bakarak bağlantımızı bir yapalım
bu bağlantımız bittikten sonra aşşağıda verilen kodları IDE programımız ile arduinomuza gönderelim
/*
Bluetooth Servo Kapı Kilidi
HC-06 Bluetooth + Servo Motor
Bağlantılar:
- Servo SIGNAL → Pin 9
- Servo VCC → 5V
- Servo GND → GND
- HC-06 TX → Pin 10 (SoftwareSerial RX)
- HC-06 RX → Pin 11 (SoftwareSerial TX)
- HC-06 VCC → 5V
- HC-06 GND → GND
Komutlar:
'A' → Kilidi Aç (0° → 90°)
'K' → Kilidi Kapat (90° → 0°)
'D' → Durum Sorgula (yanıt: "ACK" veya "KLT")
*/
#include <Servo.h>
#include <SoftwareSerial.h>
SoftwareSerial bt(10, 11); // RX, TX
Servo kilit;
const int SERVO_PIN = 9;
const int ACIK_DERECE = 90; // Açık pozisyon
const int KAPALI_DERECE = 0; // Kapalı pozisyon
bool kilitAcik = false;
void setup() {
Serial.begin(9600);
bt.begin(9600);
kilit.attach(SERVO_PIN);
kilit.write(KAPALI_DERECE); // Başlangıçta kapalı
delay(500);
Serial.println("Kilit sistemi hazir. Bekleniyor...");
}
void loop() {
if (bt.available()) {
char cmd = bt.read();
Serial.print("Komut: ");
Serial.println(cmd);
if (cmd == 'A' || cmd == 'a') {
// Kilidi AC
kilit.write(ACIK_DERECE);
kilitAcik = true;
bt.print("ACK"); // Açık onayı
Serial.println("Kilit ACILDI");
} else if (cmd == 'K' || cmd == 'k') {
// Kilidi KAPAT
kilit.write(KAPALI_DERECE);
kilitAcik = false;
bt.print("KLT"); // Kapalı onayı
Serial.println("Kilit KAPATILDI");
} else if (cmd == 'D' || cmd == 'd') {
// Durum sorgula
if (kilitAcik) {
bt.print("ACK");
} else {
bt.print("KLT");
}
}
}
}kodlarımızı da attıktan sonra sistemi çalıştırmak için bilgisayarımıza buradaki dosyaları İNDİRİYORUZ
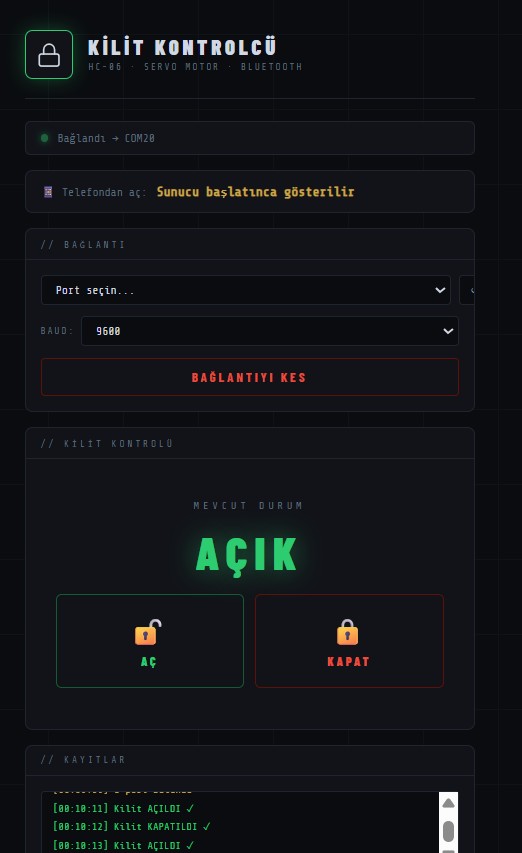
indirdiğimiz bu dosyaları klasöre çıkartıyoruz ve BASLAT.dat dosyasını sağ klik yönetici olarak çalıştırıyoruz tarayıcımızdan http://localhost:5000 veya http://bilgisayarınızın ip adres :5000 (benim bilgisayarımın bağlantısı http://192.168.1.15:5000 idi) adresini giriyoruz açılan web sayfasından size uygun bluetooth portunu seçerek bağlantıyı sağlayıp aç kapa yaparak kilit kullanımını sağlamış oluyorsunuz portu bilmiyorsanız sıra ile deneyiniz
cep telefonu ile de aynı ağ üzerinde bağlı iseniz pc ile aynı ağda iseniz aynı adresi yani o bilgisayarın adresini girerek görüntüleyebilir ve kontrol edebilirsiniz ben cep telefonuma http://192.168.1.15:5000 yazarak açılmasını sağlayıp kontrol edebildim